
Mạch điện RLC – Wikipedia tiếng Việt
 Hình minh họa hoạt động của một mạch LC, là một mạch RLC không có trở kháng. Dòng chảy qua lại giữa các bản tụ và xuyên qua cuộn cảm. Năng lượng dao động qua lại giữa điện trường của tụ điện (E) và từ trường của cuộn cảm (B) hoạt động tương tự như trong mạch RLC, ngoại trừ nếu có R thì dao động này sẽ tắt dần theo thời gian.
Hình minh họa hoạt động của một mạch LC, là một mạch RLC không có trở kháng. Dòng chảy qua lại giữa các bản tụ và xuyên qua cuộn cảm. Năng lượng dao động qua lại giữa điện trường của tụ điện (E) và từ trường của cuộn cảm (B) hoạt động tương tự như trong mạch RLC, ngoại trừ nếu có R thì dao động này sẽ tắt dần theo thời gian.
Mạch điện RLC (hoặc mạch LCR, mạch CRL hay mạch RCL) là một mạch điện gồm một điện trở, một cuộn cảm và một tụ điện, mắc nối tiếp hoặc song song. Các chữ cái RLC là những ký hiệu điện thông thường tương ứng với trở kháng, điện cảm và điện dung. Mạch tạo thành một dao động điều hòa cho dòng điện và cộng hưởng giống như mạch LC. Điểm khác biệt chính là có điện trở sẽ làm tắt dần dao động nếu như mạch không có nguồn nuôi. Một mạch bất kỳ luôn luôn tồn tại trở kháng ngay cả khi mạch không có điện trở. Mạch LC lý tưởng không trở kháng là một mô hình trừu tượng chỉ sử dụng trong lý thuyết.
Mạch RLC có nhiều ứng dụng. Chúng được sử dụng trong nhiều loại mạch xê dịch khác nhau. Một ứng dụng quan trọng là mạch kiểm soát và điều chỉnh, ví dụ điển hình như trong những bộ thu phát radio hoặc truyền hình ( rà đài ), được sử dụng để lựa chọn một dải tần hẹp của sóng vô tuyến từ thiên nhiên và môi trường xung quanh. Mạch RLC hoàn toàn có thể được sử dụng như một bộ lọc thông dải ( band-pass ), bộ lọc chặn dải ( band-stop ), bộ lọc thông thấp hay bộ lọc thông cao. Ứng dụng trong mạch kiểm soát và điều chỉnh là một ví dụ của bộ lộc thông dải. Bộ lọc RLC được diễn đạt như thể một mạch bậc hai, có nghĩa là điện áp hoặc cường độ dòng điện tại thời gian bất kể trong mạch hoàn toàn có thể được trình diễn bằng một phương trình vi phân bậc hai khi nghiên cứu và phân tích mạch .
Mạch RLC mắc nối tiếp[sửa|sửa mã nguồn]
Mạch RLC mắc nối tiếp[sửa|sửa mã nguồn]
|
|
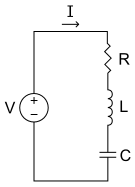
Figure 1: RLC series circuit |
|
Trong mạch này các thành phần điện trở, cuộn cảm và tụ điện được mắc nối tiếp với nhau và nối vào một nguồn điện áp. Phương trình biến thiên có thể được tính bằng định luật Kirchhoff về điện thế:
Bạn đang đọc: Mạch điện RLC – Wikipedia tiếng Việt
-
- v R + v L + v C = v ( t ) { \ displaystyle v_ { R } + v_ { L } + v_ { C } = v ( t ) \, }
- v R + v L + v C = v ( t ) { \ displaystyle v_ { R } + v_ { L } + v_ { C } = v ( t ) \, }

với
v
R
,
v
L
,
v
C
{\displaystyle \textstyle v_{R},v_{L},v_{C}}

v
(
t
)
{\displaystyle \textstyle v(t)}

-
- R i ( t ) + L d i d t + 1 C ∫ − ∞ τ = t i ( τ ) d τ = v ( t ) { \ displaystyle Ri ( t ) + L { { di } \ over { dt } } + { 1 \ over C } \ int _ { – \ infty } ^ { \ tau = t } i ( \ tau ) \, d \ tau = v ( t ) }
- R i ( t ) + L d i d t + 1 C ∫ − ∞ τ = t i ( τ ) d τ = v ( t ) { \ displaystyle Ri ( t ) + L { { di } \ over { dt } } + { 1 \ over C } \ int _ { – \ infty } ^ { \ tau = t } i ( \ tau ) \, d \ tau = v ( t ) }

Trong trường hợp điện áp nguồn không đổi khác, lấy vi phân và chia 2 vế cho L, sẽ cho ra một phương trình vi phân bậc 2 :
-
- d 2 i ( t ) d t 2 + R L d i ( t ) d t + 1 L C i ( t ) = 0 { \ displaystyle { { d ^ { 2 } i ( t ) } \ over { dt ^ { 2 } } } + { R \ over L } { { di ( t ) } \ over { dt } } + { 1 \ over { LC } } i ( t ) = 0 }
- d 2 i ( t ) d t 2 + R L d i ( t ) d t + 1 L C i ( t ) = 0 { \ displaystyle { { d ^ { 2 } i ( t ) } \ over { dt ^ { 2 } } } + { R \ over L } { { di ( t ) } \ over { dt } } + { 1 \ over { LC } } i ( t ) = 0 }

Phương trình này thường được trình diễn dưới dạng :
-
- d 2 i ( t ) d t 2 + 2 α d i ( t ) d t + ω 0 2 i ( t ) = 0 { \ displaystyle { { d ^ { 2 } i ( t ) } \ over { dt ^ { 2 } } } + 2 \ alpha { { di ( t ) } \ over { dt } } + { \ omega _ { 0 } } ^ { 2 } i ( t ) = 0 }
- d 2 i ( t ) d t 2 + 2 α d i ( t ) d t + ω 0 2 i ( t ) = 0 { \ displaystyle { { d ^ { 2 } i ( t ) } \ over { dt ^ { 2 } } } + 2 \ alpha { { di ( t ) } \ over { dt } } + { \ omega _ { 0 } } ^ { 2 } i ( t ) = 0 }

α
{\displaystyle \alpha \,}

ω
0
{\displaystyle \omega _{0}\,}

α
{\displaystyle \alpha \,}
gọi là tần số neper là đại lượng đặc trưng cho tốc độ tắt của dao động trong mạch nếu nguồn cấp không còn. Gọi là tần số neper vì nó có đơn vị là neper/giây (Np/s), neper là đơn vị của suy giảm.
ω
0
{\displaystyle \omega _{0}\,}
là tần số góc cộng hưởng.[1]
Đối với mạch RLC mắc nối tiếp, thì 2 đại lượng này được tính bởi công thức : [ 2 ]
-
- α = R 2 L { \ displaystyle \ alpha = { R \ over 2L } }
ω 0 = 1 L C { \ displaystyle \ omega _ { 0 } = { 1 \ over { \ sqrt { LC } } } }
- α = R 2 L { \ displaystyle \ alpha = { R \ over 2L } }

Một thông số hữu ích là hệ số suy giảm (hệ số tắt),
ζ
{\displaystyle \zeta }

-
- ζ = α ω 0 { \ displaystyle \ zeta = { \ frac { \ alpha } { \ omega _ { 0 } } } }
- ζ = α ω 0 { \ displaystyle \ zeta = { \ frac { \ alpha } { \ omega _ { 0 } } } }

Đối với mạch RLC mắc nối tiếp, thì thông số suy giảm như sau :
-
- ζ = R 2 C L { \ displaystyle \ zeta = { R \ over 2 } { \ sqrt { C \ over L } } }
- ζ = R 2 C L { \ displaystyle \ zeta = { R \ over 2 } { \ sqrt { C \ over L } } }

Giá trị của hệ số suy giảm xác định kiểu tắt dao động của mạch.[3] Một vài tác giả không dùng
ζ
{\displaystyle \zeta \,}

α
{\displaystyle \alpha \,}
.[4]
Đáp ứng quá độ[sửa|sửa mã nguồn]
![]() Giản đồ xung biểu diễn đáp ứng dưới tắt dần và xung tắt dần của một mạch RLC nối tiếp. Đáp ứng tắt dần tới hạn là đường cong đỏ đậm. Với L = 1, C = 1 và ω 0 = 1 { \ displaystyle \ scriptstyle \ omega _ { 0 } = 1 \, }
Giản đồ xung biểu diễn đáp ứng dưới tắt dần và xung tắt dần của một mạch RLC nối tiếp. Đáp ứng tắt dần tới hạn là đường cong đỏ đậm. Với L = 1, C = 1 và ω 0 = 1 { \ displaystyle \ scriptstyle \ omega _ { 0 } = 1 \, }

Phương trình vi phân của mạch tùy thuộc vào ba loại giá trị của
ζ
{\displaystyle \scriptstyle \zeta \,}

ζ
<
1
{\displaystyle \scriptstyle \zeta <1\,}

ζ
>
1
{\displaystyle \scriptstyle \zeta >1\,}

-
- s 2 + 2 α s + ω 0 2 = 0 { \ displaystyle s ^ { 2 } + 2 \ alpha s + { \ omega _ { 0 } } ^ { 2 } = 0 }
- s 2 + 2 α s + ω 0 2 = 0 { \ displaystyle s ^ { 2 } + 2 \ alpha s + { \ omega _ { 0 } } ^ { 2 } = 0 }

Nghiệm s của phương trình:[5]
-
- s 1 = − α + α 2 − ω 0 2 { \ displaystyle s_ { 1 } = – \ alpha + { \ sqrt { \ alpha ^ { 2 } – { \ omega _ { 0 } } ^ { 2 } } } }
- s 2 = − α − α 2 − ω 0 2 { \ displaystyle s_ { 2 } = – \ alpha – { \ sqrt { \ alpha ^ { 2 } – { \ omega _ { 0 } } ^ { 2 } } } }
- s 1 = − α + α 2 − ω 0 2 { \ displaystyle s_ { 1 } = – \ alpha + { \ sqrt { \ alpha ^ { 2 } – { \ omega _ { 0 } } ^ { 2 } } } }


Ứng với mỗi giá trị của s ta có đáp ứng tự nhiên
A
1
e
s
1
t
{\displaystyle A_{1}e^{s_{1}t}}

A
2
e
s
2
t
{\displaystyle A_{2}e^{s_{2}t}}

-
- i ( t ) = A 1 e s 1 t + A 2 e s 2 t { \ displaystyle i ( t ) = A_ { 1 } e ^ { s_ { 1 } t } + A_ { 2 } e ^ { s_ { 2 } t } }
- i ( t ) = A 1 e s 1 t + A 2 e s 2 t { \ displaystyle i ( t ) = A_ { 1 } e ^ { s_ { 1 } t } + A_ { 2 } e ^ { s_ { 2 } t } }

Đáp ứng tắt dần[sửa|sửa mã nguồn]
Đáp ứng tắt dần ( ζ > 1 { \ displaystyle \ scriptstyle \ zeta > 1 \, } ), [ 6 ]
-
- i ( t ) = A 1 e − ω 0 ( ζ + ζ 2 − 1 ) t + A 2 e − ω 0 ( ζ − ζ 2 − 1 ) t { \ displaystyle i ( t ) = A_ { 1 } e ^ { – \ omega _ { 0 } \ left ( \ zeta + { \ sqrt { \ zeta ^ { 2 } – 1 } } \ right ) t } + A_ { 2 } e ^ { – \ omega _ { 0 } \ left ( \ zeta – { \ sqrt { \ zeta ^ { 2 } – 1 } } \ right ) t } }
- i ( t ) = A 1 e − ω 0 ( ζ + ζ 2 − 1 ) t + A 2 e − ω 0 ( ζ − ζ 2 − 1 ) t { \ displaystyle i ( t ) = A_ { 1 } e ^ { – \ omega _ { 0 } \ left ( \ zeta + { \ sqrt { \ zeta ^ { 2 } – 1 } } \ right ) t } + A_ { 2 } e ^ { – \ omega _ { 0 } \ left ( \ zeta – { \ sqrt { \ zeta ^ { 2 } – 1 } } \ right ) t } }

Đáp ứng tắt dần là một sự giảm suất của dòng quá độ không giao động. [ 7 ]
Đáp ứng dưới tắt dần[sửa|sửa mã nguồn]
Đáp ứng dưới tắt dần ( ζ < 1 { \ displaystyle \ scriptstyle \ zeta < 1 \, } ), [ 8 ]
-
- i ( t ) = B 1 e − α t cos ( ω d t ) + B 2 e − α t sin ( ω d t ) { \ displaystyle i ( t ) = B_ { 1 } e ^ { – \ alpha t } \ cos ( \ omega _ { d } t ) + B_ { 2 } e ^ { – \ alpha t } \ sin ( \ omega _ { d } t ) \, }
- i ( t ) = B 1 e − α t cos ( ω d t ) + B 2 e − α t sin ( ω d t ) { \ displaystyle i ( t ) = B_ { 1 } e ^ { – \ alpha t } \ cos ( \ omega _ { d } t ) + B_ { 2 } e ^ { – \ alpha t } \ sin ( \ omega _ { d } t ) \, }

Áp dụng tính chất lượng giác, hai hàm lượng giác hoàn toàn có thể biến hóa thành 1 hàm sin duy nhất với pha di dời, [ 9 ]
-
- i ( t ) = B 3 e − α t sin ( ω d t + φ ) { \ displaystyle i ( t ) = B_ { 3 } e ^ { – \ alpha t } \ sin ( \ omega _ { d } t + \ varphi ) \, }
- i ( t ) = B 3 e − α t sin ( ω d t + φ ) { \ displaystyle i ( t ) = B_ { 3 } e ^ { – \ alpha t } \ sin ( \ omega _ { d } t + \ varphi ) \, }

Đáp ứng dưới tắt dần là một dao động giảm suất tại tần số
ω
d
{\displaystyle \omega _{d}\,}

α
{\displaystyle \alpha \,}
. Số mũ
α
{\displaystyle \alpha \,}
biểu diễn đường bao của dao động. B1 và B2 (hoặc B3 và pha dịch chuyển
φ
{\displaystyle \varphi \,}

ω
d
{\displaystyle \omega _{d}\,}
được tính bởi công thức,[8]
-
- ω d = ω 0 2 − α 2 = ω 0 1 − ζ 2 { \ displaystyle \ omega _ { d } = { \ sqrt { { \ omega _ { 0 } } ^ { 2 } – \ alpha ^ { 2 } } } = \ omega _ { 0 } { \ sqrt { 1 – \ zeta ^ { 2 } } } }
- ω d = ω 0 2 − α 2 = ω 0 1 − ζ 2 { \ displaystyle \ omega _ { d } = { \ sqrt { { \ omega _ { 0 } } ^ { 2 } – \ alpha ^ { 2 } } } = \ omega _ { 0 } { \ sqrt { 1 – \ zeta ^ { 2 } } } }

Nó được gọi là tần số cộng hưởng tắt dần hay tần số tắt dần tự nhiên, là tần số mà mạch điện sẽ tự xê dịch nếu không có nguồn nuôi bên ngoài. Tần số cộng hưởng, ω 0 { \ displaystyle \ omega _ { 0 } \, }, là tần số mà mạch điện sẽ cộng hưởng với một giao động bên ngoài, thường được gọi là tần số cộng hưởng không tắt dần để phân biệt. [ 10 ]
Đáp ứng tắt dần tới hạn[sửa|sửa mã nguồn]
Đáp ứng tắt dần tới hạn ( ζ = 1 { \ displaystyle \ scriptstyle \ zeta = 1 \, } ), [ 11 ]
-
- i ( t ) = D 1 t e − α t + D 2 e − α t { \ displaystyle i ( t ) = D_ { 1 } te ^ { – \ alpha t } + D_ { 2 } e ^ { – \ alpha t } \, }
- i ( t ) = D 1 t e − α t + D 2 e − α t { \ displaystyle i ( t ) = D_ { 1 } te ^ { – \ alpha t } + D_ { 2 } e ^ { – \ alpha t } \, }

Đáp ứng tắt dần tới hạn cho thấy mạch điện quá độ suy giảm trong một khoảng thời gian nhanh nhất có thể mà không dao động. Đặc tính này rất quan trọng trong những hệ thống điều khiển, vì nó có thể đạt đến trạng thái mong muốn mà không bị vượt quá. D1 và D2 là những hằng số tùy ý xác định bởi điều kiện biên.[12]
Mạch RLC nối tiếp có thể được phân tích cho cả dòng không đổi lẫn dòng biến đổi đều bằng cách sử dụng phép biến đổi Laplace.[13] Nếu nguồn điện ở trên có điện áp biến đổi dạng sóng với biến đổi Laplace V(s) (s là tần số phức
s
=
σ
+
i
ω
{\displaystyle s=\sigma +i\omega \,}

-
- V ( s ) = I ( s ) ( R + L s + 1 C s ) { \ displaystyle V ( s ) = I ( s ) \ left ( R + Ls + { \ frac { 1 } { Cs } } \ right ) }
- V ( s ) = I ( s ) ( R + L s + 1 C s ) { \ displaystyle V ( s ) = I ( s ) \ left ( R + Ls + { \ frac { 1 } { Cs } } \ right ) }

với I(s) là dòng biến đổi Laplace chạy qua tất cả các thành phần. Tính I(s):
-
- I ( s ) = 1 R + L s + 1 C s V ( s ) { \ displaystyle I ( s ) = { \ frac { 1 } { R + Ls + { \ frac { 1 } { Cs } } } } V ( s ) }
- I ( s ) = 1 R + L s + 1 C s V ( s ) { \ displaystyle I ( s ) = { \ frac { 1 } { R + Ls + { \ frac { 1 } { Cs } } } } V ( s ) }

Sắp xếp lại, ta có :
-
- I ( s ) = s L ( s 2 + R L s + 1 L C ) V ( s ) { \ displaystyle I ( s ) = { \ frac { s } { L \ left ( s ^ { 2 } + { R \ over L } s + { \ frac { 1 } { LC } } \ right ) } } V ( s ) }
- I ( s ) = s L ( s 2 + R L s + 1 L C ) V ( s ) { \ displaystyle I ( s ) = { \ frac { s } { L \ left ( s ^ { 2 } + { R \ over L } s + { \ frac { 1 } { LC } } \ right ) } } V ( s ) }

Tổng dẫn Laplace[sửa|sửa mã nguồn]
Tính tổng dẫn Laplace Y(s):
-
-
Y
(
s
)
=I
(
s
)V
(
s
)=
s
L
(
s
2
+
R
Ls
+1
L
C)
{\displaystyle Y(s)={I(s) \over V(s)}={\frac {s}{L\left(s^{2}+{R \over L}s+{\frac {1}{LC}}\right)}}}
-

Đơn giản hóa bằng cách sử dụng những tham số α và ωo đã được định nghĩa trong phần trước, ta có :
-
- Y ( s ) = I ( s ) V ( s ) = s L ( s 2 + 2 α s + ω 0 2 ) { \ displaystyle Y ( s ) = { I ( s ) \ over V ( s ) } = { \ frac { s } { L \ left ( s ^ { 2 } + 2 \ alpha s + { \ omega _ { 0 } } ^ { 2 } \ right ) } } }
- Y ( s ) = I ( s ) V ( s ) = s L ( s 2 + 2 α s + ω 0 2 ) { \ displaystyle Y ( s ) = { I ( s ) \ over V ( s ) } = { \ frac { s } { L \ left ( s ^ { 2 } + 2 \ alpha s + { \ omega _ { 0 } } ^ { 2 } \ right ) } } }

Điểm cực và điểm không[sửa|sửa mã nguồn]
Điểm không của Y(s) là những giá trị s làm cho
Y
(
s
)
=
0
{\displaystyle Y(s)=0}

-
- s = 0 và | s | → ∞ { \ displaystyle s = 0 { \ text { và } } | s | \ rightarrow \ infty }
- s = 0 và | s | → ∞ { \ displaystyle s = 0 { \ text { và } } | s | \ rightarrow \ infty }

Điểm cực của Y(s) là những giá trị s làm cho
Y
(
s
)
→
∞
{\displaystyle Y(s)\rightarrow \infty }

-
- s = − α ± α 2 − ω 0 2 { \ displaystyle s = – \ alpha \ pm { \ sqrt { \ alpha ^ { 2 } – { \ omega _ { 0 } } ^ { 2 } } } }
- s = − α ± α 2 − ω 0 2 { \ displaystyle s = – \ alpha \ pm { \ sqrt { \ alpha ^ { 2 } – { \ omega _ { 0 } } ^ { 2 } } } }

Các cực của Y(s) giống như các nghiệm
s
1
{\displaystyle s_{1}}

s
2
{\displaystyle s_{2}}

Công thức tổng quát[sửa|sửa mã nguồn]
Đối với nguồn E(t) bất kỳ, sử dụng phép biến đổi nghịch cho I(s):
-
- I ( t ) = 1 L ∫ 0 t E ( t − τ ) e − α τ ( cos ω d τ − α ω d sin ω d τ ) d τ { \ displaystyle I ( t ) = { \ frac { 1 } { L } } \ int _ { 0 } ^ { t } E ( t – \ tau ) e ^ { – \ alpha \ tau } \ left ( \ cos \ omega _ { d } \ tau – { \ alpha \ over \ omega _ { d } } \ sin \ omega _ { d } \ tau \ right ) \, d \ tau }
trong trường hợp đáp ứng dưới tắt dần ( ω 0 > α ) { \ displaystyle ( \ omega _ { 0 } > \ alpha ) }
I ( t ) = 1 L ∫ 0 t E ( t − τ ) e − α τ ( 1 − α τ ) d τ { \ displaystyle I ( t ) = { \ frac { 1 } { L } } \ int _ { 0 } ^ { t } E ( t – \ tau ) e ^ { – \ alpha \ tau } ( 1 – \ alpha \ tau ) \, d \ tau }
trong trường hợp đáp ứng tắt dần tới hạn ( ω 0 = α ) { \ displaystyle ( \ omega _ { 0 } = \ alpha ) }
- I ( t ) = 1 L ∫ 0 t E ( t − τ ) e − α τ ( cos ω d τ − α ω d sin ω d τ ) d τ { \ displaystyle I ( t ) = { \ frac { 1 } { L } } \ int _ { 0 } ^ { t } E ( t – \ tau ) e ^ { – \ alpha \ tau } \ left ( \ cos \ omega _ { d } \ tau – { \ alpha \ over \ omega _ { d } } \ sin \ omega _ { d } \ tau \ right ) \, d \ tau }

-
- I ( t ) = 1 L ∫ 0 t E ( t − τ ) e − α τ ( cosh ω r τ − α ω r sinh ω r τ ) d τ { \ displaystyle I ( t ) = { \ frac { 1 } { L } } \ int _ { 0 } ^ { t } E ( t – \ tau ) e ^ { – \ alpha \ tau } \ left ( \ cosh \ omega _ { r } \ tau – { \ alpha \ over \ omega _ { r } } \ sinh \ omega _ { r } \ tau \ right ) \, d \ tau }
trong trường hợp đáp ứng tắt dần ( ω 0 < α ) { \ displaystyle ( \ omega _ { 0 } < \ alpha ) }
- I ( t ) = 1 L ∫ 0 t E ( t − τ ) e − α τ ( cosh ω r τ − α ω r sinh ω r τ ) d τ { \ displaystyle I ( t ) = { \ frac { 1 } { L } } \ int _ { 0 } ^ { t } E ( t – \ tau ) e ^ { – \ alpha \ tau } \ left ( \ cosh \ omega _ { r } \ tau – { \ alpha \ over \ omega _ { r } } \ sinh \ omega _ { r } \ tau \ right ) \, d \ tau }

với
ω
r
=
α
2
−
ω
0
2
{\displaystyle \omega _{r}={\sqrt {\alpha ^{2}-{\omega _{0}}^{2}}}}

Trạng thái ổn định hình sin[sửa|sửa mã nguồn]
Trạng thái ổn định hình sin được biểu diễn bằng cách cho
s
=
i
ω
{\displaystyle s=i\omega \,}
Thế vào phương trình ở trên và lấy độ lớn:

-
- | Y ( s = i ω ) | = 1 R 2 + ( ω L − 1 ω C ) 2. { \ displaystyle \ displaystyle | Y ( s = i \ omega ) | = { \ frac { 1 } { \ sqrt { R ^ { 2 } + \ left ( \ omega L – { \ frac { 1 } { \ omega C } } \ right ) ^ { 2 } } } }. }
- | Y ( s = i ω ) | = 1 R 2 + ( ω L − 1 ω C ) 2. { \ displaystyle \ displaystyle | Y ( s = i \ omega ) | = { \ frac { 1 } { \ sqrt { R ^ { 2 } + \ left ( \ omega L – { \ frac { 1 } { \ omega C } } \ right ) ^ { 2 } } } }. }

Cường độ dòng điện là một hàm theo ω, tính bằng công thức:
-
- | I ( i ω ) | = | Y ( i ω ) | | V ( i ω ) |. { \ displaystyle \ displaystyle | I ( i \ omega ) | = | Y ( i \ omega ) | | V ( i \ omega ) |. \, }
- | I ( i ω ) | = | Y ( i ω ) | | V ( i ω ) |. { \ displaystyle \ displaystyle | I ( i \ omega ) | = | Y ( i \ omega ) | | V ( i \ omega ) |. \, }

Có một giá trị cực đại của
|
I
(
i
ω
)
|
{\displaystyle |I(i\omega )|}

-
- ω 0 = 1 L C. { \ displaystyle \ omega _ { 0 } = { \ frac { 1 } { \ sqrt { LC } } }. }
- ω 0 = 1 L C. { \ displaystyle \ omega _ { 0 } = { \ frac { 1 } { \ sqrt { LC } } }. }

Mạch RLC song song[sửa|sửa mã nguồn]
 Mạch RLC song song Mạch RLC song song
|
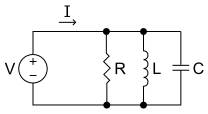
| Hình 5. Mạch RLC song song |
|
Các đặc thù của mạch RLC song song hoàn toàn có thể được tính bằng quan hệ đối ngẫu của mạch điện, trải qua đổi khác trở kháng đối ngẫu từ mạch song song sang mạch nối tiếp RLC và vận dụng những công thức của mạch nối tiếp ở trên .
Đối với mạch song song, ta tính được tốc độ tắt dần α bằng công thức:[15]
-
- α = 1 2 R C { \ displaystyle \ alpha = { 1 \ over 2RC } }
- α = 1 2 R C { \ displaystyle \ alpha = { 1 \ over 2RC } }

và thông số suy giảm :
-
- ζ = 1 2 R L C { \ displaystyle \ zeta = { 1 \ over 2R } { \ sqrt { L \ over C } } }
- ζ = 1 2 R L C { \ displaystyle \ zeta = { 1 \ over 2R } { \ sqrt { L \ over C } } }

Đây là nghịch đảo của ζ trong mạch nối tiếp. Tương tự như thế ta cũng tính được hệ số phẩm chất Q và băng thông tỉ lệ:
-
- Q. = R C L và F b = 1 R L C { \ displaystyle Q = R { \ sqrt { C \ over L } } { \ text { và } } F_ { \ mathrm { b } } = { 1 \ over R } { \ sqrt { L \ over C } } }
- Q. = R C L và F b = 1 R L C { \ displaystyle Q = R { \ sqrt { C \ over L } } { \ text { và } } F_ { \ mathrm { b } } = { 1 \ over R } { \ sqrt { L \ over C } } }

Miền tần số[sửa|sửa mã nguồn]

Hình 6. Phân tích trạng thái ổn định hình sin.
với R = 1 ohm, C = 1 farad, L = 1 henry, và V = 1.0 volt
Tổng dẫn phức của mạch song song là tổng độ dẫn nạp của những thành phần :
-
- 1 Z = 1 Z L + 1 Z C + 1 Z R = 1 j ω L + j ω C + 1 R { \ displaystyle { 1 \ over Z } = { 1 \ over Z_ { L } } + { 1 \ over Z_ { C } } + { 1 \ over Z_ { R } } = { 1 \ over { j \ omega L } } + { j \ omega C } + { 1 \ over R } }
- 1 Z = 1 Z L + 1 Z C + 1 Z R = 1 j ω L + j ω C + 1 R { \ displaystyle { 1 \ over Z } = { 1 \ over Z_ { L } } + { 1 \ over Z_ { C } } + { 1 \ over Z_ { R } } = { 1 \ over { j \ omega L } } + { j \ omega C } + { 1 \ over R } }

Sự biến hóa từ mạch nối tiếp sang mạch song song dẫn đến trong mạch Open một trở kháng cực lớn lúc cộng hưởng chứ không phải là cực tiểu, do đó mạch chống lại cộng hưởng .Đồ thị bên cho thấy có một cực tiểu trong cung ứng tần số của dòng điện ở tần số cộng hưởng ω 0 = 1 L C { \ displaystyle \ omega _ { 0 } = { 1 \ over { \ sqrt { LC } } } } khi mạch được cấp bởi một điện áp không đổi. Mặt khác, nếu mạch được cấp bởi một nguồn dòng không đổi, sẽ có cực lớn trong điện áp tựa như như đồ thị của mạch nối tiếp .
Các dạng khác[sửa|sửa mã nguồn]
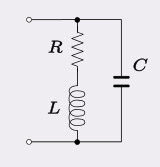 Hình. 7. Mạch RLC song song, với điện trở mắc nối tiếp với cuộn cảm
Hình. 7. Mạch RLC song song, với điện trở mắc nối tiếp với cuộn cảm
 Hình. 8. Mạch RLC nối tiếp, với điện trở song song với tụ điện
Hình. 8. Mạch RLC nối tiếp, với điện trở song song với tụ điện
Một điện trở mắc nối tiếp với cuộn cảm trong mạch song song LC như hình 7 là một cấu trúc phổ biến thường thấy khi phân tích điện trở có trong cuộn cảm. Mạch song song LC thương được dùng trong mạch lọc thông dải (band pass filer) và hệ số phẩm chất Q phần lớn bị ảnh hưởng bởi điện trở này. Tần số dao động của mạch là,[16]
-
- ω 0 = 1 L C − ( R L ) 2 { \ displaystyle \ omega _ { 0 } = { \ sqrt { { \ frac { 1 } { LC } } – \ left ( { \ frac { R } { L } } \ right ) ^ { 2 } } } }
- ω 0 = 1 L C − ( R L ) 2 { \ displaystyle \ omega _ { 0 } = { \ sqrt { { \ frac { 1 } { LC } } – \ left ( { \ frac { R } { L } } \ right ) ^ { 2 } } } }

Đây là tần số cộng hưởng của mạch được định nghĩa là tần số ứng với khi tổng dẫn có phần ảo bằng không. Tần số mà Open trong dạng tổng quát của phương trình đặc trưng dưới đây :
-
- s 2 + 2 α s + ω 0 ′ 2 = 0 { \ displaystyle s ^ { 2 } + 2 \ alpha s + { \ omega ‘ _ { 0 } } ^ { 2 } = 0 }
- s 2 + 2 α s + ω 0 ′ 2 = 0 { \ displaystyle s ^ { 2 } + 2 \ alpha s + { \ omega ‘ _ { 0 } } ^ { 2 } = 0 }

không phải là tần số cộng hưởng ở trên. Trong trường hợp này nó là tần số cộng hưởng tự nhiên không tắt dần. [ 17 ]
-
- ω 0 ′ = 1 L C { \ displaystyle \ omega ‘ _ { 0 } = { \ sqrt { \ frac { 1 } { LC } } } }
- ω 0 ′ = 1 L C { \ displaystyle \ omega ‘ _ { 0 } = { \ sqrt { \ frac { 1 } { LC } } } }

Tần số
ω
m
{\displaystyle \omega _{m}}

-
- ω m = ω 0 ′ − 1 Q. L 2 + 1 + 2 Q L 2 { \ displaystyle \ omega _ { m } = \ omega ‘ _ { 0 } { \ sqrt { { \ frac { – 1 } { Q_ { L } ^ { 2 } } } + { \ sqrt { 1 + { \ frac { 2 } { Q_ { L } ^ { 2 } } } } } } } }
- ω m = ω 0 ′ − 1 Q. L 2 + 1 + 2 Q L 2 { \ displaystyle \ omega _ { m } = \ omega ‘ _ { 0 } { \ sqrt { { \ frac { – 1 } { Q_ { L } ^ { 2 } } } + { \ sqrt { 1 + { \ frac { 2 } { Q_ { L } ^ { 2 } } } } } } } }

với
Q
L
=
ω
0
′
L
R
{\displaystyle Q_{L}={\frac {\omega ‘_{0}L}{R}}}

-
- ω m ≈ ω 0 ′ 1 − 1 2 Q L 4 { \ displaystyle \ omega _ { m } \ approx \ omega ‘ _ { 0 } { \ sqrt { 1 – { \ frac { 1 } { 2Q _ { L } ^ { 4 } } } } } }
- ω m ≈ ω 0 ′ 1 − 1 2 Q L 4 { \ displaystyle \ omega _ { m } \ approx \ omega ‘ _ { 0 } { \ sqrt { 1 – { \ frac { 1 } { 2Q _ { L } ^ { 4 } } } } } }

Độ lớn trở kháng cực lớn, [ 18 ]
-
- | Z | m a x = R Q. L 2 1 2 Q L Q. L 2 + 2 − 2 Q L 2 − 1 { \ displaystyle | Z | _ { max } = RQ_ { L } ^ { 2 } { \ sqrt { \ frac { 1 } { 2Q _ { L } { \ sqrt { Q_ { L } ^ { 2 } + 2 } } – 2Q _ { L } ^ { 2 } – 1 } } } }
- | Z | m a x = R Q. L 2 1 2 Q L Q. L 2 + 2 − 2 Q L 2 − 1 { \ displaystyle | Z | _ { max } = RQ_ { L } ^ { 2 } { \ sqrt { \ frac { 1 } { 2Q _ { L } { \ sqrt { Q_ { L } ^ { 2 } + 2 } } – 2Q _ { L } ^ { 2 } – 1 } } } }

Với giá trị
Q
L
≫
1
{\displaystyle Q_{L}\gg 1}

-
- | Z | m a x ≈ R Q L 2 { \ displaystyle | Z | _ { max } \ approx { RQ_ { L } ^ { 2 } } }
- | Z | m a x ≈ R Q L 2 { \ displaystyle | Z | _ { max } \ approx { RQ_ { L } ^ { 2 } } }

Bằng chứng tiên phong cho thấy một tụ điện hoàn toàn có thể tạo ra xê dịch điện được nhà khoa học người Pháp Felix Savary phát hiện vào năm 1826. [ 19 ] [ 20 ] Ông nhận thấy rằng khi một chai Leyden được tháo điện ra một dây dẫn quấn xung quanh một kim sắt, thì kim sắt bị từ hóa và tạo ra từ trường đổi hướng qua lại. Ông suy luận đúng chuẩn hiện tượng kỳ lạ này là do một giao động tắt dần trong dây dẫn, làm đảo ngược sự từ hóa của kim qua lại cho đến khi nó nhỏ dần đến mất tính năng, và để lại kim bị từ hóa theo một hướng ngẫu nhiên .
Năm 1842, nhà vật lý người Mỹ Joseph Henry lặp đi lặp lại thí nghiệm của Savary và cũng đi đến Kết luận tựa như, gần như là một cách độc lập. [ 21 ] [ 22 ] Khoa học gia người Anh William Thomson ( Lord Kelvin ) vào năm 1853 cho thấy một cách đúng mực rằng việc xả một chai Leyden ra một cuộn cảm sẽ tạo ra giao động, và đã tính được tần số cộng hưởng của nó. [ 19 ] [ 21 ] [ 22 ]
- Anant Agarwal, Jeffrey H. Lang, Foundations of analog and digital electronic circuits, Morgan Kaufmann, 2005 ISBN 1-55860-735-8.
- J. L. Humar, Dynamics of structures, Taylor & Francis, 2002 ISBN 90-5809-245-3.
- J. David Irwin, Basic engineering circuit analysis, Wiley, 2006 ISBN 7-302-13021-3.
- Kenneth L. Kaiser, Electromagnetic compatibility handbook, CRC Press, 2004 ISBN 0-8493-2087-9.
- James William Nilsson, Susan A. Riedel, Electric circuits, Prentice Hall, 2008 ISBN 0-13-198925-1.
Source: https://vvc.vn
Category : Điện Tử